一、改造目标与思路
Nikon F90X / N90S 采用一套复杂的机制,来进行过片控制。
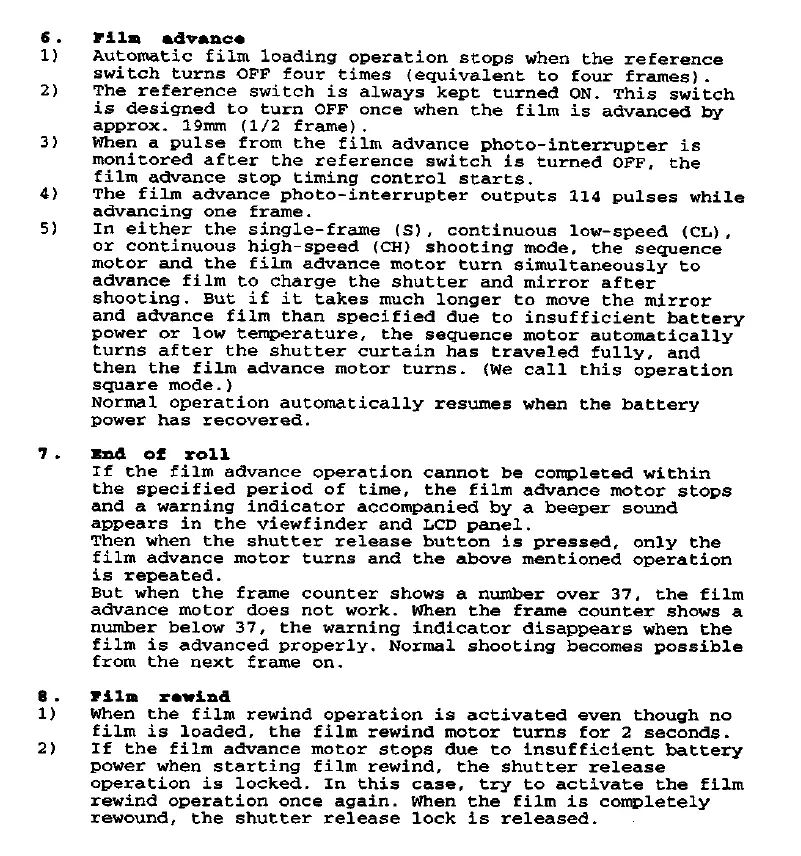
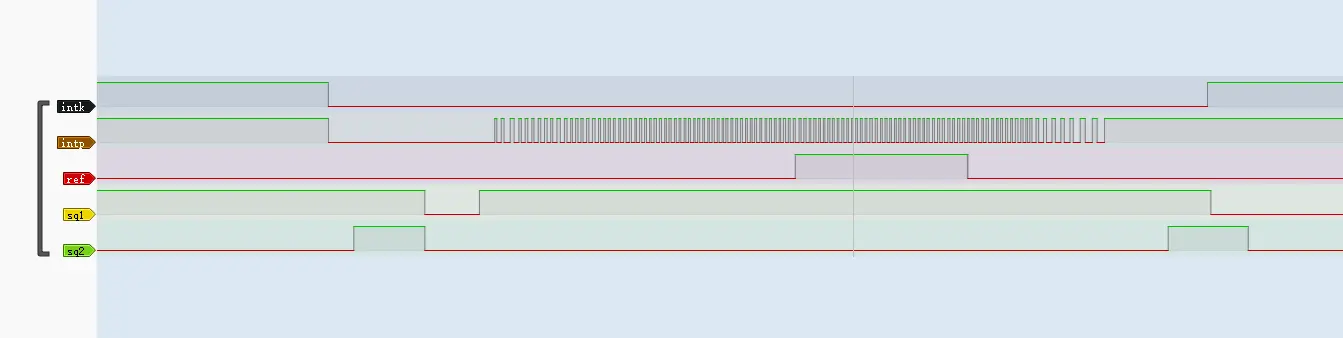
6. 胶片进片(过片)
- 当参考开关(也就是我们监测的ref)断开四次(相当于四个画幅)时,自动装片操作停止。
- 参考开关始终保持在导通状态。该开关在胶片每进给约 19 mm(半幅)时断开一次。
- 当参考开关断开后,监测胶片进片光电遮断器(intp)的脉冲输出,进片停止定时控制开始。
- 胶片进片光电遮断器在进给一个画幅期间输出 114 个脉冲。
在一般状态下,正常全画幅过片约 114 个 INTP (光遮断传感器,其与卷片齿轮耦合,INTK点亮,监测传感器通过齿孔旋转,在不断的遮断/打开之间获得脉冲,来计算过片量)脉冲。
方画幅 / 半格改造需要在胶片走到约 5/8 位置(实测约 71 脉冲,可配置为 50 等)时强行停住,让机身认为本帧结束。
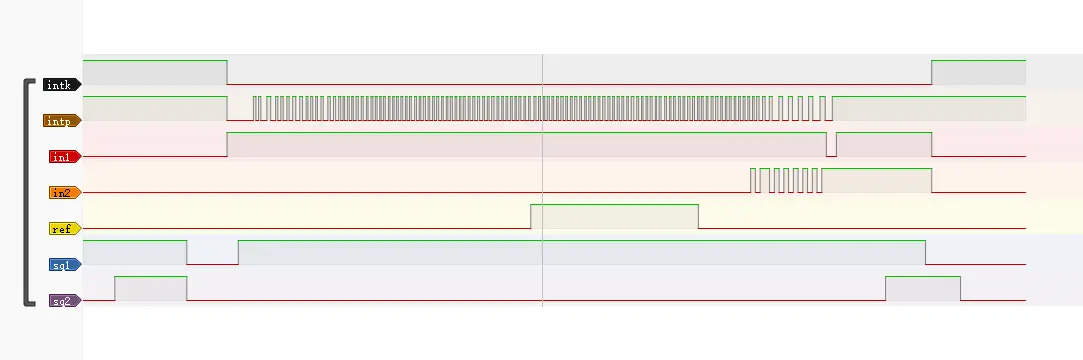
经过测试,单纯修改RAM地址 FE7E 为 71、或伪造 REF不能稳定实现方画幅;
一个可行的路径是:检测INTP 计数到目标值 → 提前拉停 IN1/IN2 → 进入END状态→用串口清 RAM 残留态→松刹进入下一张待命。
因此,通过监测真实的INTP,并电控拉停IN1/IN2,我们可以实现比较精确的过片量控制,从而任意实现半格/方格乃至N格的控制。
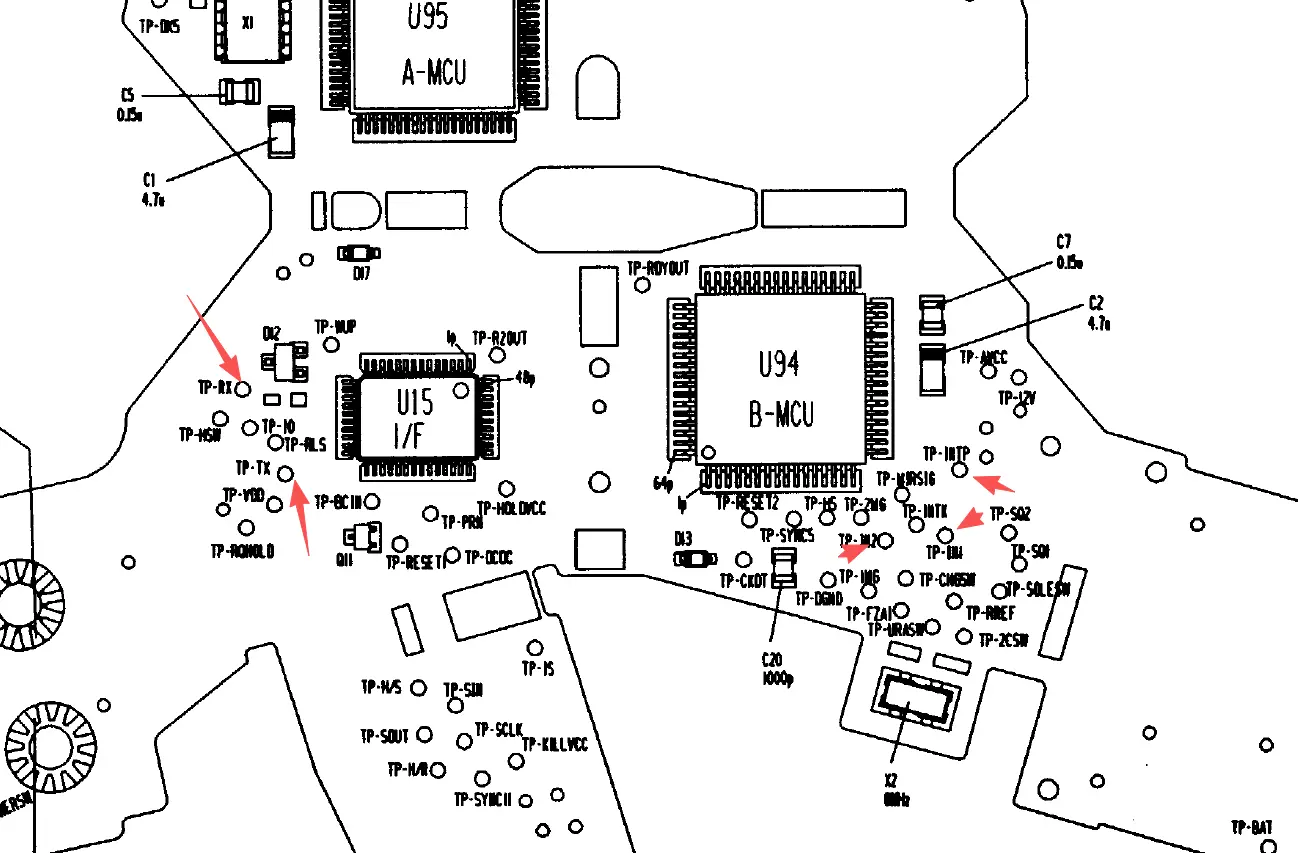
二、硬件连接
因为机身请求5V IO控制,所以本次试验我们采用了Arduino Uno进行控制。
| 信号 | Arduino Uno | 机身 |
|---|---|---|
| INTP 脉冲 | D2(中断输入) | 顺序光耦 TP-INTP |
| 电机刹停 IN1 | D6(开漏拉低) | TP-IN1 |
| 电机刹停 IN2 | D7(开漏拉低) | TP-IN2 |
| 串口 RX | D10 | 机身 TX |
| 串口 TX | D11 | 机身 RX |
| 地 | GND | 共地 |
| 调试 | USB 115200 | — |
刹停采用开漏拉低(BRAKE_OPEN_DRAIN=1),松刹时引脚改回输入,由机身上拉释放电机。
附件口协议与 Nikon 官方附件一致:1200 bps 唤醒 → S1000 识别 → 9600 bps → 0x80 读 RAM / 0x81 写 RAM。
三、反编译ROM得到的RAM变量含义
3.1 关键 RAM 变量
| 地址 | 含义 |
|---|---|
FE7D | INTP 脉冲计数(过片中递增) |
FE7E | 停止阈值(由 EEPROM 演算,不是固定 114) |
FEE1 | 连拍空闲计时;无脉冲 ≥ 0xC8(~200ms) → FE4E=0x23(End) |
FEE4 | 堵转计时(16 bit) |
FE4E | 错误 / 模式码(0=正常,02=装卷,23/33=End 等) |
FED4.1 | 过片活跃 |
FED4.6 | 电机运行(来自 FE20.7) |
FEBBH | 过片阶段标志 |
FE50 / FE51 | LCD 字符(52/5A = End 显示) |
FEC5.5 | 置位后 FE51=0x5A |
FD21 | 帧计数相关(影响串口 busy 门) |
外刹停住物理胶片后,机身 MCU 仍认为过片进行中:
FED4.1常为 1FE7D停在 ~47(71 脉冲附近)FEE1继续向 200ms 超时计数- 若不干预 →
FE4E=0x23,LCD 显示 End
因此我们可以通过串口对特定地址的RAM进行复位。
四、UNO卷片控制固件架构
Uno代码:
/*
* F90X 卷片控制 — v17.0
*
* D2=INTP D6/D7=IN1/IN2 机身TX→D10 RX←D11 GND
* USB 115200:r/p x w c b e l h
*/
#include "f90x_cam_serial.h"
#define FW_VERSION "v17.2"
#ifndef AUTO_RELEASE_BRAKE_ON_X
#define AUTO_RELEASE_BRAKE_ON_X 1
#endif
#define PIN_INTP 2
#define PIN_IN1 6
#define PIN_IN2 7
#define BRAKE_OPEN_DRAIN 1
const uint8_t BRAKE_AT = 71;
const uint16_t BRAKE_CLR_SETTLE_MS = 100;
const uint16_t POST_CLR_GAP_MS = 40;
const uint16_t LATCH_END_POLL_MS = 2000;
const uint16_t LATCH_END_FAIL_MS = 8000;
const uint16_t LATCH_SERIAL_DEFER_MS = 500;
const uint8_t ARM_PULSES = 5;
const uint8_t ARM_PULSES_LATCH = 3;
const uint16_t ARM_WINDOW_MS = 120;
const uint16_t CONFIRM_MS = 80;
const uint16_t COOLDOWN_MS = 300;
const uint16_t BOOT_MS = 1000;
const uint16_t PREBOOT_RETRY_MS = 15000;
const uint16_t PREBOOT_FAIL_MS = 3000;
const uint16_t LOAD_BLOCK_POLL_MS = 1000;
const uint8_t LATCH_STUCK_FAIL_N = 3;
enum State { ST_BOOT, ST_IDLE, ST_ARM, ST_RUN, ST_HOLD, ST_LATCH };
volatile State gSt = ST_BOOT;
volatile uint16_t gCnt = 0;
volatile uint32_t gArmUs = 0;
volatile bool gCamBusy = false;
uint32_t gBootMs = 0;
uint32_t gLastIntpMs = 0;
uint32_t gCoolUntilMs = 0;
uint32_t gHoldStartMs = 0;
uint32_t gBrakeClrDoneMs = 0;
uint32_t gLastEndPollMs = 0;
uint32_t gLatchQuietUntilMs = 0;
uint8_t gArmN = 0;
uint8_t gCntAtBrake = 0;
bool gBrakeClrPending = false;
bool gBrakeClrDone = false;
bool gBrakeClrVerified = false;
static volatile bool gFromLatch = false;
static volatile bool gBlockArmForLoad = false;
uint32_t gLastPrebootMs = 0;
uint32_t gLastLoadPollMs = 0;
bool gEndProbeDone = false;
uint8_t gLatchClrFailN = 0;
void onIntp();
static void printHexByte(uint8_t v) {
if (v < 0x10) Serial.print('0');
Serial.print(v, HEX);
}
static void printHexBuf(const uint8_t *buf, uint8_t len) {
for (uint8_t i = 0; i < len; i++) {
if (i) Serial.print(' ');
printHexByte(buf[i]);
}
}
static bool printWindErrorDiag() {
uint8_t b = 0;
uint16_t w = 0;
bool ok = true;
Serial.print(F("WIND "));
if (f90xCamReadByte(0xFE4E, &b)) {
Serial.print(F(" FE4E=0x"));
printHexByte(b);
} else ok = false;
delay(25);
if (f90xCamReadByte(0xFEE1, &b)) {
Serial.print(F(" FEE1=0x"));
printHexByte(b);
} else ok = false;
delay(25);
if (f90xCamReadByte(0xFE7D, &b)) {
Serial.print(F(" FE7D=0x"));
printHexByte(b);
} else ok = false;
delay(25);
if (f90xCamReadByte(0xFE7E, &b)) {
Serial.print(F(" FE7E=0x"));
printHexByte(b);
} else ok = false;
delay(25);
if (f90xCamReadWord(0xFEE4, &w)) {
Serial.print(F(" FEE4=0x"));
printHexByte((uint8_t)(w & 0xFF));
printHexByte((uint8_t)(w >> 8));
} else ok = false;
if (!ok) {
Serial.print(F(" (partial)"));
f90xCamPrintLastRx();
}
Serial.println();
return ok;
}
static void printAdvanceChainExtra() {
uint8_t feb0 = 0, feb2 = 0, fe40 = 0, fed5 = 0, fed7 = 0, feb5 = 0, fe47 = 0;
uint8_t fe9f = 0, fe5e = 0;
uint16_t fe70 = 0, fee4w = 0;
if (f90xCamReadByte(0xFEB0, &feb0)) {
Serial.print(F(" FEB0=0x"));
printHexByte(feb0);
if (feb0 & 0x04) Serial.print(F(" [.2=待过片!]"));
Serial.println();
}
delay(20);
if (f90xCamReadByte(0xFEB2, &feb2)) {
Serial.print(F(" FEB2=0x"));
printHexByte(feb2);
if (feb2 & 0x04) Serial.print(F(" [.2=过片处理中!]"));
Serial.println();
}
delay(20);
if (f90xCamReadByte(0xFE40, &fe40)) {
Serial.print(F(" FE40=0x"));
printHexByte(fe40);
if (fe40 == 0x0C) Serial.print(F(" (过片镜像态)"));
else if (fe40 == 0x0D) Serial.print(F(" (FEBBH忙)"));
else if (fe40 == 0x0E) Serial.print(F(" (错误/等待态)"));
Serial.println();
}
delay(20);
if (f90xCamReadByte(0xFED5, &fed5)) {
Serial.print(F(" FED5=0x"));
printHexByte(fed5);
if (fed5 & 0x04) Serial.print(F(" [.2=过片链]"));
Serial.println();
}
delay(20);
if (f90xCamReadByte(0xFED7, &fed7)) {
Serial.print(F(" FED7=0x"));
printHexByte(fed7);
Serial.println();
}
delay(20);
if (f90xCamReadWord(0xFE70, &fe70)) {
Serial.print(F(" FE70=0x"));
printHexByte((uint8_t)(fe70 & 0xFF));
printHexByte((uint8_t)(fe70 >> 8));
Serial.println(F(" (延迟函数指针)"));
}
delay(20);
if (f90xCamReadByte(0xFEB5, &feb5)) {
Serial.print(F(" FEB5=0x"));
printHexByte(feb5);
if (feb5) Serial.print(F(" (异步忙)"));
Serial.println();
}
delay(20);
if (f90xCamReadByte(0xFE47, &fe47)) {
Serial.print(F(" FE47=0x"));
printHexByte(fe47);
if (fe47 & 0x20) Serial.print(F(" [.5→FE40=0E]"));
Serial.println();
}
delay(20);
if (f90xCamReadByte(0xFE9F, &fe9f)) {
Serial.print(F(" FE9F=0x"));
printHexByte(fe9f);
Serial.println();
}
delay(20);
if (f90xCamReadByte(0xFE5E, &fe5e)) {
Serial.print(F(" FE5E=0x"));
printHexByte(fe5e);
if (fe5e == 0) Serial.print(F(" (倒计时归零→0E)"));
Serial.println();
}
delay(20);
if (f90xCamReadWord(0xFEE4, &fee4w)) {
Serial.print(F(" FEE4=0x"));
printHexByte((uint8_t)(fee4w & 0xFF));
printHexByte((uint8_t)(fee4w >> 8));
Serial.println();
}
}
static bool printFilmEndDiag(const __FlashStringHelper *tag) {
uint8_t fd14[18];
uint8_t fed[7];
uint8_t fe57 = 0, fe24 = 0, fe50 = 0, fe51 = 0;
uint8_t fed4 = 0, fec5 = 0, fe46 = 0;
uint8_t febb = 0, fec4 = 0, fe7d = 0;
uint8_t fd2d = 0;
uint8_t fd39[10];
uint8_t n = 0;
uint8_t fedLen = 0;
uint8_t fd39Len = 0;
bool ok = true;
Serial.print(tag);
Serial.println(F("FILM/LCD"));
if (f90xCamReadRam(0xFD14, 18, fd14, sizeof(fd14), &n) && n >= 18) {
Serial.print(F(" FD14="));
printHexBuf(fd14, 2);
Serial.print(F(" FD16(eep186)="));
printHexBuf(fd14 + 2, 8);
Serial.print(F(" FD21="));
printHexByte(fd14[13]);
Serial.print(F(" FD22="));
printHexBuf(fd14 + 14, 2);
Serial.print(F(" FD25=shutter "));
printHexByte(fd14[17]);
Serial.println();
} else {
ok = false;
Serial.println(F(" FD14..FD25 read fail"));
f90xCamPrintLastRx();
}
delay(40);
if (f90xCamReadByte(0xFD2D, &fd2d)) {
Serial.print(F(" FD2D=0x"));
printHexByte(fd2d);
Serial.println(F(" (帧计数相关)"));
} else ok = false;
delay(25);
if (f90xCamReadRam(0xFD39, 10, fd39, sizeof(fd39), &fd39Len) && fd39Len >= 1) {
Serial.print(F(" FD39="));
printHexBuf(fd39, fd39Len > 4 ? 4 : fd39Len);
Serial.println();
} else ok = false;
delay(25);
if (f90xCamReadRam(0xFED0, 7, fed, sizeof(fed), &fedLen) && fedLen >= 7) {
Serial.print(F(" FED0=0x"));
printHexByte(fed[0]);
Serial.print(F(" FED6=0x"));
printHexByte(fed[6]);
if (fed[6] & 0x02) Serial.print(F(" [FED6.1]"));
Serial.println();
} else {
ok = false;
Serial.println(F(" FED0..FED6 read fail"));
}
delay(25);
if (f90xCamReadByte(0xFE57, &fe57)) {
Serial.print(F(" FE57=0x"));
printHexByte(fe57);
Serial.println();
} else ok = false;
delay(25);
if (f90xCamReadByte(0xFE24, &fe24)) {
Serial.print(F(" FE24=0x"));
printHexByte(fe24);
if (fe24 == 0x72) Serial.print(F(" (=114脉冲?)"));
Serial.println();
} else ok = false;
delay(25);
if (f90xCamReadByte(0xFED4, &fed4)) {
Serial.print(F(" FED4=0x"));
printHexByte(fed4);
if (fed4 & 0x02) Serial.print(F(" [.1=LCD52]"));
if (fed4 & 0x40) Serial.print(F(" [.6=过片中!]"));
Serial.println();
} else ok = false;
delay(25);
if (f90xCamReadByte(0xFE7D, &fe7d)) {
Serial.print(F(" FE7D=0x"));
printHexByte(fe7d);
if (fe7d != 0) Serial.print(F(" (半帧计数残留)"));
Serial.println();
} else ok = false;
delay(25);
if (f90xCamReadByte(0xFEBB, &febb)) {
Serial.print(F(" FEBBH=0x"));
printHexByte(febb);
if (febb & 0x01) Serial.print(F(" [.0=过片忙]"));
Serial.println();
} else ok = false;
delay(25);
printAdvanceChainExtra();
if (f90xCamReadByte(0xFEC4, &fec4)) {
Serial.print(F(" FEC4=0x"));
printHexByte(fec4);
Serial.println();
} else ok = false;
delay(25);
if (f90xCamReadByte(0xFEC5, &fec5)) {
Serial.print(F(" FEC5=0x"));
printHexByte(fec5);
if (fec5 & 0x20) Serial.print(F(" [FEC5.5→FE51=5A]"));
Serial.println();
} else ok = false;
delay(25);
if (f90xCamReadByte(0xFE46, &fe46)) {
Serial.print(F(" FE46=0x"));
printHexByte(fe46);
Serial.println();
} else ok = false;
delay(25);
if (f90xCamReadByte(0xFE50, &fe50) && f90xCamReadByte(0xFE51, &fe51)) {
Serial.print(F(" LCD FE50=0x"));
printHexByte(fe50);
Serial.print(F(" FE51=0x"));
printHexByte(fe51);
bool lcdEnd = (fe51 == 0x5A) && (fe50 == 0x52 || fe50 == 0x4D || fe50 == 0x54);
if (lcdEnd) Serial.print(F(" [LCD End]"));
Serial.println();
} else ok = false;
if (ok && n >= 18) {
uint8_t fd21 = fd14[13];
if (fe51 == 0x5A && fe50 == 0x52) {
Serial.println(F(" => LCD End @第5张: 外刹残留态(FE4E已清)"));
Serial.println(F(" FE50=52←FED4.1 FE51=5A←FEC5.5 非片尾"));
} else if (fe51 == 0x5A) {
Serial.println(F(" => LCD End态 (ROM @1C45/@3CFD)"));
} else if (fed4 & 0x40) {
Serial.println(F(" => FED4.6 过片链卡住 — 按 w 或 x"));
} else if (fe7d != 0) {
Serial.println(F(" => FE7D 半帧残留 — 按 w 恢复"));
} else if (febb & 0x07) {
Serial.println(F(" => FEBBH 过片忙 — 按 w"));
} else {
Serial.println(F(" => 无 LCD End;若仍不过片看 FEB2/FE40"));
}
if (fd21 >= 0x01 && fd21 <= 0x28) {
Serial.print(F(" => FD21=第"));
Serial.print((int)fd21 - 1);
Serial.println(F(" 张附近"));
}
}
return ok;
}
static void printRamDiag(const __FlashStringHelper *tag) {
gCamBusy = true;
if (!f90xCamEnsureSession(true)) {
Serial.println(F("RAM bootstrap fail — press b"));
gCamBusy = false;
return;
}
delay(100);
Serial.print(tag);
printWindErrorDiag();
printFilmEndDiag(F(""));
gCamBusy = false;
}
static void printUsbHelp() {
Serial.println(F("--- USB commands (115200, Uno USB) ---"));
Serial.println(F(" r read wind-error + film-end RAM"));
Serial.println(F(" p read film/LCD (FD21 FE50/FE51 FD2D)"));
Serial.println(F(" c clear wind-error (FE4E/FEE1/FEE4)"));
Serial.println(F(" x clear LCD End + resume (LATCH 成功自动松刹)"));
Serial.println(F(" w resume advance (FEB0/FEB2/FE40 chain)"));
Serial.println(F(" b bootstrap camera serial"));
Serial.println(F(" e end serial session"));
Serial.println(F(" l force IDLE + release brake"));
Serial.println(F(" h this help"));
}
static bool lcdEndLooksCleared(uint8_t fe50, uint8_t fe51) {
return fe51 != 0x5A && fe50 != 0x52;
}
static bool fe4eIsLoadMode(uint8_t fe4e) {
return fe4e == 0x01 || fe4e == 0x02 || fe4e == 0x04 || fe4e == 0x21;
}
static void updateLoadArmBlock() {
if (gCamBusy || !f90xCamIsReady()) return;
if (gSt != ST_IDLE && gSt != ST_LATCH) return;
uint32_t now = millis();
if (gLastLoadPollMs != 0 && now - gLastLoadPollMs < LOAD_BLOCK_POLL_MS) return;
gLastLoadPollMs = now;
gCamBusy = true;
uint8_t fe4e = 0;
bool wasBlocked = gBlockArmForLoad;
if (f90xCamReadByte(0xFE4E, &fe4e)) {
gBlockArmForLoad = fe4eIsLoadMode(fe4e);
if (gBlockArmForLoad && !wasBlocked) {
Serial.print(F("ARM block load FE4E=0x"));
printHexByte(fe4e);
Serial.println();
} else if (!gBlockArmForLoad && wasBlocked) {
Serial.println(F("ARM load block off"));
}
}
gCamBusy = false;
}
static void releaseBrakeToIdle(const __FlashStringHelper *tag) {
brakeOff();
gFromLatch = false;
gSt = ST_IDLE;
gArmN = 0;
gCnt = 0;
gBrakeClrPending = false;
gBrakeClrDone = false;
gBrakeClrVerified = false;
gLatchClrFailN = 0;
gLatchQuietUntilMs = 0;
gLastEndPollMs = millis() + LATCH_END_FAIL_MS;
Serial.print(tag);
Serial.println(F(" auto brake off"));
}
static void releaseBrakeIfLatched(const __FlashStringHelper *tag) {
if (gSt != ST_LATCH) return;
releaseBrakeToIdle(tag);
}
static bool clearEndAggressive(const __FlashStringHelper *tag) {
for (uint8_t n = 0; n < 3; n++) {
if (f90xCamClearEndStateFast()) {
Serial.print(tag);
Serial.println(F(" fast ok"));
return true;
}
if (f90xCamClearEndStateBrake()) {
Serial.print(tag);
Serial.println(F(" med ok"));
return true;
}
if (f90xCamClearEndState()) {
Serial.print(tag);
Serial.println(F(" full ok"));
return true;
}
delay(40);
}
return false;
}
// 手动清 End:握手 → 读 FE4E → 三档重试写零 → 读回验证
static bool manualClearEnd() {
gCamBusy = true;
if (!f90xCamEnsureSession(true)) {
Serial.println(F("MANUAL bootstrap fail — try b"));
gCamBusy = false;
return false;
}
delay(100);
uint8_t fe4e = 0xFF;
if (f90xCamReadByte(0xFE4E, &fe4e)) {
Serial.print(F("MANUAL before FE4E=0x"));
printHexByte(fe4e);
Serial.println();
} else {
Serial.println(F("MANUAL read fail — blind CLR"));
f90xCamPrintLastRx();
}
bool ok = clearEndAggressive(F("MANUAL CLR"));
if (!ok) ok = f90xCamClearEndStateRetry(3);
if (f90xCamReadByte(0xFE4E, &fe4e)) {
Serial.print(F("MANUAL after FE4E=0x"));
printHexByte(fe4e);
if (fe4e == 0) {
Serial.println(F(" OK"));
f90xCamEndSession(false);
gEndProbeDone = false;
} else {
Serial.println(F(" still error"));
}
} else if (ok) {
Serial.println(F("MANUAL CLR sent (unverified)"));
} else {
Serial.println(F("MANUAL CLR FAIL — retry c or b then c"));
f90xCamPrintLastRx();
}
gCamBusy = false;
return ok;
}
// 仅恢复卷片链(LCD 已清但电机不动时用)
static bool manualResumeAdvance() {
gCamBusy = true;
if (!f90xCamEnsureSession(true)) {
Serial.println(F("RESUME bootstrap fail — try b"));
gCamBusy = false;
return false;
}
delay(100);
uint8_t fed4 = 0, fe7d = 0, feb2 = 0, fe40 = 0;
if (f90xCamReadByte(0xFED4, &fed4) && f90xCamReadByte(0xFE7D, &fe7d)) {
Serial.print(F("RESUME before FED4=0x"));
printHexByte(fed4);
Serial.print(F(" FE7D=0x"));
printHexByte(fe7d);
Serial.println();
}
bool ok = false;
for (uint8_t n = 0; n < 3 && !ok; n++) {
ok = f90xCamResumeAdvanceState();
delay(60);
}
bool gotAfter = f90xCamReadByte(0xFED4, &fed4) && f90xCamReadByte(0xFE7D, &fe7d);
(void)f90xCamReadByte(0xFEB2, &feb2);
(void)f90xCamReadByte(0xFE40, &fe40);
if (gotAfter) {
Serial.print(F("RESUME after FED4=0x"));
printHexByte(fed4);
Serial.print(F(" FE7D=0x"));
printHexByte(fe7d);
Serial.print(F(" FEB2=0x"));
printHexByte(feb2);
Serial.print(F(" FE40=0x"));
printHexByte(fe40);
Serial.println();
if (ok) {
Serial.println(F(" OK —按 l 松刹后试快门过片"));
f90xCamEndSession(false);
gEndProbeDone = false;
} else {
Serial.println(F(" partial — 按 r 看 FEB2/FE40/FEBBH,再试 w 或关机"));
if (!ok) f90xCamPrintLastRx();
}
} else if (ok) {
Serial.println(F("RESUME sent (unverified)"));
} else {
Serial.println(F("RESUME FAIL — 按 r 或 b 后重试"));
f90xCamPrintLastRx();
}
gCamBusy = false;
return ok;
}
// 清 LCD End(FE4E=0 仍显示 End):FEC5.5/FED4.1/FE50/FE51
static bool manualClearLcdEnd() {
gCamBusy = true;
if (!f90xCamEnsureSession(true)) {
Serial.println(F("LCD CLR bootstrap fail — try b"));
gCamBusy = false;
return false;
}
delay(100);
uint8_t fe50 = 0, fe51 = 0;
if (f90xCamReadByte(0xFE50, &fe50) && f90xCamReadByte(0xFE51, &fe51)) {
Serial.print(F("LCD before FE50=0x"));
printHexByte(fe50);
Serial.print(F(" FE51=0x"));
printHexByte(fe51);
Serial.println();
}
bool ok = false;
bool lcdOk = false;
bool chainOk = false;
for (uint8_t n = 0; n < 3 && !ok; n++) {
ok = f90xCamClearLcdEndState() && f90xCamResumeAdvanceState();
delay(60);
}
if (f90xCamReadByte(0xFE50, &fe50) && f90xCamReadByte(0xFE51, &fe51)) {
lcdOk = lcdEndLooksCleared(fe50, fe51);
chainOk = f90xCamAdvanceChainLooksIdle();
Serial.print(F("LCD after FE50=0x"));
printHexByte(fe50);
Serial.print(F(" FE51=0x"));
printHexByte(fe51);
if (lcdOk && chainOk) {
Serial.println(F(" OK"));
gEndProbeDone = false;
gLatchClrFailN = 0;
#if AUTO_RELEASE_BRAKE_ON_X
releaseBrakeIfLatched(F("LCD CLR"));
#endif
} else if (lcdOk) {
Serial.println(F(" LCD ok chain busy —试 w 或再 x"));
gEndProbeDone = false;
pollRecoverAutoRelease(true);
} else {
Serial.println(F(" still End — retry x"));
}
} else if (ok) {
Serial.println(F("LCD CLR sent (unverified)"));
} else {
Serial.println(F("LCD CLR FAIL"));
f90xCamPrintLastRx();
}
gCamBusy = false;
return ok;
}
static void probeCamEndOnce() {
if (gEndProbeDone || gCamBusy || !f90xCamIsReady()) return;
if (gSt != ST_IDLE && gSt != ST_LATCH) return;
gCamBusy = true;
uint8_t fe4e = 0, fe50 = 0, fe51 = 0;
bool gotFe4e = f90xCamReadByte(0xFE4E, &fe4e);
delay(20);
bool gotLcd = f90xCamReadByte(0xFE50, &fe50) && f90xCamReadByte(0xFE51, &fe51);
delay(20);
if (gotFe4e && fe4e != 0) {
Serial.print(F("CAM wind-error FE4E=0x"));
printHexByte(fe4e);
Serial.println(F(" — press c"));
} else if (gotLcd && fe51 == 0x5A &&
(fe50 == 0x52 || fe50 == 0x4D || fe50 == 0x54)) {
Serial.print(F("CAM LCD-End FE50=0x"));
printHexByte(fe50);
Serial.print(F(" FE51=0x"));
printHexByte(fe51);
Serial.println(F(" — press x (c无效)"));
}
gEndProbeDone = true;
gCamBusy = false;
}
static bool tryBrakeFullClear() {
uint32_t t0 = millis();
bool verified = false;
if (!f90xCamBrakeFullRecover(&verified)) {
Serial.print(F("BRAKE full fail "));
Serial.print(millis() - t0);
Serial.println(F("ms"));
return false;
}
Serial.print(F("BRAKE full "));
Serial.print(millis() - t0);
Serial.println(F("ms"));
if (verified) {
Serial.println(F("BRAKE verify ok"));
gBrakeClrVerified = true;
gLatchClrFailN = 0;
gEndProbeDone = false;
} else {
Serial.println(F("BRAKE partial — x/w if no wind"));
}
return true;
}
static void pollRecoverAutoRelease(bool verified) {
#if AUTO_RELEASE_BRAKE_ON_X
if (verified) releaseBrakeIfLatched(F("LATCH CLR"));
#else
(void)verified;
#endif
}
static void tryIdlePreboot() {
if (gCamBusy || f90xCamIsReady()) return;
if (gSt != ST_IDLE && gSt != ST_LATCH) return;
if (gSt == ST_LATCH && millis() < gLatchQuietUntilMs) return;
uint32_t now = millis();
if (gLastPrebootMs != 0 && now - gLastPrebootMs < PREBOOT_RETRY_MS) return;
gLastPrebootMs = now;
gCamBusy = true;
if (f90xCamBootstrap(false)) {
Serial.println(F("PREBOOT ok"));
gEndProbeDone = false;
} else {
Serial.println(F("PREBOOT fail — press b"));
gLastPrebootMs = now - PREBOOT_RETRY_MS + PREBOOT_FAIL_MS;
}
gCamBusy = false;
}
static void pollEndAndClear() {
if (gSt != ST_LATCH) return;
gCamBusy = true;
uint32_t nextPollMs = LATCH_END_POLL_MS;
if (gBrakeClrVerified) {
if (f90xCamIsReady()) {
uint8_t fe51 = 0, fe50 = 0;
if (f90xCamReadByte(0xFE51, &fe51) &&
f90xCamReadByte(0xFE50, &fe50) &&
lcdEndLooksCleared(fe50, fe51) &&
f90xCamAdvanceChainLooksIdle()) {
gLatchClrFailN = 0;
nextPollMs = 30000;
#if AUTO_RELEASE_BRAKE_ON_X
releaseBrakeToIdle(F("LATCH ok"));
#endif
goto done;
}
gBrakeClrVerified = false;
Serial.println(F("LATCH re-check: need CLR again"));
}
}
if (!f90xCamIsReady()) {
if (!f90xCamBootstrap(false)) {
Serial.println(F("END poll bootstrap fail"));
nextPollMs = LATCH_END_FAIL_MS;
goto done;
}
}
delay(50);
{
uint8_t fe4e = 0;
bool readOk = f90xCamReadByte(0xFE4E, &fe4e);
bool needRecover = false;
if (readOk && fe4e == 0) {
uint8_t fe51 = 0, fe50 = 0;
bool gotLcd = f90xCamReadByte(0xFE51, &fe51) &&
f90xCamReadByte(0xFE50, &fe50);
if (gotLcd && fe51 == 0x5A &&
(fe50 == 0x52 || fe50 == 0x4D || fe50 == 0x54)) {
needRecover = true;
} else if (!f90xCamAdvanceChainLooksIdle()) {
needRecover = true;
} else {
gLatchClrFailN = 0;
nextPollMs = 10000;
goto done;
}
} else if (readOk) {
Serial.print(F("END det FE4E=0x"));
printHexByte(fe4e);
Serial.println();
needRecover = true;
} else {
Serial.println(F("END read fail — blind CLR"));
needRecover = true;
}
if (needRecover) {
bool verified = false;
if (f90xCamBrakeFullRecover(&verified)) {
gLatchClrFailN = 0;
Serial.println(verified ? F("LATCH CLR verify ok") : F("LATCH CLR partial"));
if (verified) {
gBrakeClrVerified = true;
pollRecoverAutoRelease(true);
} else {
uint8_t fe51 = 0, fe50 = 0;
if (f90xCamReadByte(0xFE50, &fe50) &&
f90xCamReadByte(0xFE51, &fe51) &&
lcdEndLooksCleared(fe50, fe51)) {
Serial.println(F("LATCH LCD ok — auto brake off, try w if stuck"));
pollRecoverAutoRelease(true);
}
}
gEndProbeDone = false;
} else {
gLatchClrFailN++;
Serial.print(F("LATCH CLR FAIL n="));
Serial.println(gLatchClrFailN);
nextPollMs = LATCH_END_FAIL_MS;
if (gLatchClrFailN >= LATCH_STUCK_FAIL_N) {
Serial.println(F("STUCK: force brake off → IDLE (try w/x)"));
releaseBrakeIfLatched(F("STUCK"));
gLatchClrFailN = 0;
}
}
}
}
done:
gLastEndPollMs = millis() + nextPollMs;
gCamBusy = false;
}
static void handleUsbCommand(char c) {
switch (c) {
case 'c':
case 'C':
manualClearEnd();
return;
case 'x':
case 'X':
manualClearLcdEnd();
return;
case 'w':
case 'W':
manualResumeAdvance();
return;
}
if (gCamBusy) return;
switch (c) {
case 'r':
case 'R':
printRamDiag(F("MANUAL "));
break;
case 'p':
case 'P':
gCamBusy = true;
if (!f90xCamEnsureSession(true)) {
Serial.println(F("FILM bootstrap fail — press b"));
} else {
delay(100);
printFilmEndDiag(F("MANUAL "));
}
gCamBusy = false;
break;
case 'h':
case 'H':
case '?':
printUsbHelp();
break;
case 'b':
case 'B':
gCamBusy = true;
gLastPrebootMs = millis();
if (f90xCamBootstrap(true))
Serial.println(F("bootstrap OK"));
else
Serial.println(F("bootstrap FAIL"));
gCamBusy = false;
break;
case 'e':
case 'E':
gCamBusy = true;
f90xCamEndSession(true);
gLastPrebootMs = 0;
gEndProbeDone = false;
Serial.println(F("session end"));
gCamBusy = false;
break;
case 'l':
case 'L':
releaseBrakeToIdle(F("force"));
break;
default:
break;
}
}
static void brakeOn() {
pinMode(PIN_IN1, OUTPUT);
pinMode(PIN_IN2, OUTPUT);
#if BRAKE_OPEN_DRAIN
digitalWrite(PIN_IN1, LOW);
digitalWrite(PIN_IN2, LOW);
#else
digitalWrite(PIN_IN1, HIGH);
digitalWrite(PIN_IN2, HIGH);
#endif
}
static void brakeOff() {
#if !BRAKE_OPEN_DRAIN
digitalWrite(PIN_IN1, LOW);
digitalWrite(PIN_IN2, LOW);
#endif
pinMode(PIN_IN1, INPUT);
pinMode(PIN_IN2, INPUT);
}
static void intpListenOn() {
pinMode(PIN_INTP, INPUT);
attachInterrupt(digitalPinToInterrupt(PIN_INTP), onIntp, RISING);
}
static void startCooldown() {
gCoolUntilMs = millis() + COOLDOWN_MS;
}
static bool canArm() {
return millis() >= gCoolUntilMs;
}
static void enterLatch() {
gSt = ST_LATCH;
gLatchQuietUntilMs = millis() + LATCH_SERIAL_DEFER_MS;
gLastEndPollMs = millis() + LATCH_SERIAL_DEFER_MS;
}
static void endFrame() {
Serial.print(F("OK brake="));
Serial.print(gCntAtBrake);
Serial.print(F(" hold_ms="));
Serial.println(millis() - gHoldStartMs);
gCnt = 0;
gArmN = 0;
startCooldown();
#if AUTO_RELEASE_BRAKE_ON_X
if (gBrakeClrVerified) {
releaseBrakeToIdle(F("BRAKE"));
return;
}
#endif
Serial.println(F("LATCH"));
enterLatch();
}
static void discardBurst() {
if (gFromLatch) {
gFromLatch = false;
gArmN = 0;
brakeOn();
gSt = ST_LATCH;
startCooldown();
return;
}
brakeOff();
gSt = ST_IDLE;
gCnt = 0;
gArmN = 0;
startCooldown();
}
void onIntp() {
uint32_t t = micros();
gLastIntpMs = millis();
if (gSt == ST_IDLE || gSt == ST_LATCH) {
if (!canArm()) return;
if (gBlockArmForLoad) return;
gFromLatch = (gSt == ST_LATCH);
gSt = ST_ARM;
gArmN = 1;
gArmUs = t;
return;
}
if (gSt == ST_ARM) {
gArmN++;
uint8_t needArm = gFromLatch ? ARM_PULSES_LATCH : ARM_PULSES;
if (gArmN >= needArm &&
(t - gArmUs) < (uint32_t)ARM_WINDOW_MS * 1000UL) {
brakeOff();
gFromLatch = false;
gSt = ST_RUN;
gCnt = gArmN;
gBrakeClrPending = false;
gBrakeClrDone = false;
gBrakeClrVerified = false;
Serial.println(F("RUN"));
}
return;
}
if (gSt == ST_RUN) {
gCnt++;
if (gCnt >= BRAKE_AT) {
gSt = ST_HOLD;
gHoldStartMs = millis();
gCntAtBrake = gCnt;
brakeOn();
gBrakeClrPending = true;
gBrakeClrDone = false;
gBrakeClrVerified = false;
Serial.print(F("BRAKE@"));
Serial.println(gCnt);
}
return;
}
if (gSt == ST_HOLD) {
gCnt++;
}
}
void setup() {
pinMode(PIN_INTP, INPUT);
brakeOff();
intpListenOn();
Serial.begin(115200);
gBootMs = millis();
f90xCamForceReset();
Serial.print(F("F90X "));
Serial.println(FW_VERSION);
Serial.print(F("BRAKE_AT="));
Serial.println(BRAKE_AT);
Serial.println(F("USB: r/p x w c b e l h"));
}
void loop() {
uint32_t now = millis();
while (Serial.available()) {
handleUsbCommand((char)Serial.read());
}
if (gSt == ST_IDLE || gSt == ST_LATCH) {
tryIdlePreboot();
updateLoadArmBlock();
probeCamEndOnce();
}
if (gSt == ST_BOOT) {
brakeOff();
if (now - gBootMs >= BOOT_MS) {
gSt = ST_IDLE;
Serial.println(F("READY"));
}
return;
}
if (gSt == ST_ARM && now - gLastIntpMs >= CONFIRM_MS) {
discardBurst();
return;
}
if (gSt == ST_HOLD) {
if (gBrakeClrPending && !gBrakeClrDone && !gCamBusy &&
now - gHoldStartMs >= BRAKE_CLR_SETTLE_MS) {
gCamBusy = true;
(void)tryBrakeFullClear();
gBrakeClrDone = true;
gBrakeClrPending = false;
gBrakeClrDoneMs = millis();
gCamBusy = false;
}
if (!gBrakeClrDone) return;
if (now - gBrakeClrDoneMs < POST_CLR_GAP_MS) return;
endFrame();
return;
}
if (gSt == ST_LATCH) {
if (!gCamBusy && now >= gLatchQuietUntilMs && now >= gLastEndPollMs) {
pollEndAndClear();
}
}
}