

自然小精灵们
同为生命,为生存而拼搏,同一颗星球,一起漂流在浩瀚星河。





















奥林巴斯9mm F8鱼眼镜头是一个很有趣的玩具镜头,其小巧的体积,搭配不错的中心画质,成为M43相机中的最强镜头盖。
鱼眼效果虽然有趣,在一些情况下我们还是想要一个标准的广角画面,因此对画面进行矫正就成为“一鱼两吃”的好选择。
但是由于这枚镜头没有触点,因此我们在松下机身拍摄之后,只能通过电脑对照片进行后处理。问题来了,LR中没有该镜头的对应配置文件,该如何矫正图片?
这里结合互联网信息,提供三种解决方式:
1、LR中采用适马镜头配置文件。
2、使用开源软件——Hugin。
3、采用一个日本摄影师提供的Python脚本。
以上方案都可以高效解决矫正问题,得到不错的成片。
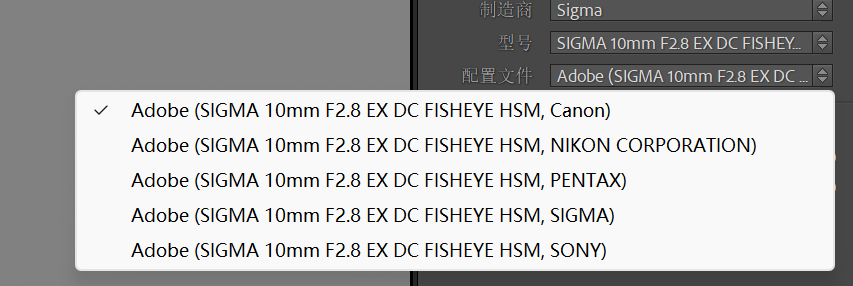
采用适马10mm F2.8 EX DC FISHEYE的矫正文件,可以取得不错的矫正效果。
要注意此操作需要在LR中进行,Ps的Camera Raw插件里的镜头矫正文件不全,效果会有问题。
步骤:
(1)安装Hugin,打开需要矫正的图片。
(2)选择全帧鱼眼,9mm,2x倍率。
(3)在全景缝合中使用直线预测,先进界面下对输出内容进行优化,导出即可。
该方法来自一个日本摄影师,我在python3.13下进行了一些调整,目前该代码创建一个GUI,可以实现拖动图片到GUI自动运行。
存在的问题:边角畸变矫正还是存在一些问题,可以对一些数值进行调整,实现更好的畸变矫正结果。
import numpy as np
import cv2
from PIL import Image
import piexif
import tkinter as tk
from tkinterdnd2 import DND_FILES, TkinterDnD
def process_image(file_path):
# 定数
scale = 0.95
fsave = file_path.replace(".JPG", "_1.JPG").replace(".jpg", "_1.jpg")
# 画像を開く
image = Image.open(file_path)
img = np.array(image, dtype=np.uint8)
h, w = img.shape[:2]
# 収差補正(Greenを拡大)
green = cv2.resize(img[:,:,1], None, fx=1.0005, fy=1.0005, interpolation=cv2.INTER_CUBIC)
difx = (green.shape[1] - w) // 2
dify = (green.shape[0] - h) // 2
img[:,:,1] = green[dify:dify+h, difx:difx+w]
# 周辺減光補正
size = max([h, w]) # 幅、高の大きい方を確保
x = np.linspace(-w/size, w/size, w)
y = np.linspace(-h/size, h/size, h) # 長い方の辺が1になるように正規化
xx, yy = np.meshgrid(x, y)
r = np.sqrt(xx**2 + yy**2)
gain = 0.4 * r + 1 # 減光補正パラメータ(固定値)
gainmap = np.dstack([gain, gain, gain]) # RGB同じゲイン
img = np.clip(img * gainmap, 0., 255).astype(np.uint8)
# 歪み補正
f = max([h, w])
mtx = np.array([[f, 0., w / 2],
[0., f, h / 2],
[0., 0., 1 ]])
# 歪み補正パラメータ(固定値)
dist = np.array([-0.63, -0.2, 0, 0, 0.8])
n_mtx = cv2.getOptimalNewCameraMatrix(mtx, dist, (img.shape[1], img.shape[0]), 1)[0]
map = cv2.initUndistortRectifyMap(mtx, dist, np.eye(3), n_mtx, (img.shape[1], img.shape[0]), cv2.CV_32FC1)
# 拡大+shift
mapx = map[0] * scale + (1 - scale) * w / 2
mapy = map[1] * scale + (1 - scale) * h / 2
img = cv2.remap(img, mapx, mapy, cv2.INTER_CUBIC)
# 4:3 -> 3:2比率への変換 (高さを 8/9する)
strt_y = h * 1 // 18
end_y = h * 17 // 18
img = img[strt_y:end_y, :, :]
# Exif付与
exif_dict = piexif.load(file_path)
exif_dict["0th"][piexif.ImageIFD.ImageWidth] = img.shape[1]
exif_dict["0th"][piexif.ImageIFD.ImageLength] = img.shape[0]
exif_dict["Exif"][piexif.ExifIFD.FocalLength] = (90, 10)
exif_dict["Exif"][piexif.ExifIFD.FNumber] = (80, 10)
exif_dict["Exif"][piexif.ExifIFD.FocalLengthIn35mmFilm] = 18
exif_dict["Exif"][piexif.ExifIFD.PixelXDimension] = img.shape[1]
exif_dict["Exif"][piexif.ExifIFD.PixelYDimension] = img.shape[0]
exif_bytes = piexif.dump(exif_dict)
# 保存
im = Image.fromarray(img)
im.save(fsave, "JPEG", exif=exif_bytes)
# 显示保存路径和 EXIF 信息
print(f"图像处理完成,文件已保存到: {fsave}")
# 提取并显示特定 EXIF 信息
exif_info = exif_dict["Exif"]
aperture = exif_info.get(piexif.ExifIFD.FNumber, "未知")
shutter_speed = exif_info.get(piexif.ExifIFD.ExposureTime, "未知")
iso = exif_info.get(piexif.ExifIFD.ISOSpeedRatings, "未知")
print("\n照片的主要 EXIF 信息:")
print(f"光圈 (Aperture): {aperture}")
print(f"快门速度 (Shutter Speed): {shutter_speed}")
print(f"感光度 (ISO): {iso}")
def drop(event):
file_paths = event.data.strip('{}').split() # 处理多个文件
for file_path in file_paths:
process_image(file_path)
# 创建主窗口
root = TkinterDnD.Tk()
root.title("图片处理")
root.geometry("400x200")
# 提示信息
label = tk.Label(root, text="将图片拖放到这里进行处理", padx=10, pady=10)
label.pack(expand=True, fill=tk.BOTH)
# 注册拖放事件
root.drop_target_register(DND_FILES)
root.dnd_bind('<<Drop>>', drop)
# 启动 Tkinter 主循环
root.mainloop()【施工中、、、】
G9M2出乎预料的舍弃了前代G9强大、坚固且手感扎实(厚重)的机身设计,选择了S5M2相同的机身设计,而在全画幅这里,S5系列最多只能算做中端定位。
因此,我们得到了一个全画幅大小的机身(在我看来这并不是槽点,因为再小的机身将会直接影响握持体验),得到了综合性能尚可的价格,失去了拍照易用的肩屏,失去了高端定位的翻折屏幕设计。
机身的降级似乎彰显了G9M2在松下M43拍照旗舰中的一些隐约变动——定位上的不断降级。也许,日后只有顶级的M43摄像机,拍照扛把子的地位将逐步被全画幅机型所替代。
我是从单反转到G9M2的,中间也用过诸如索尼Alpha、富士XH、XT等系列的相机,但是,G9M2在开机的时候就给我一整个冲击——超级慢的开机时间,这对于用惯了单反的人是难以置信的。
G9M2在长时间未开机之后会进入类似休眠的情况,开机速度非常缓慢,再开机会快一些但也难称迅速,这对于一部主打性能的相机来说简直不可理喻,仿佛有什么庞大的软件在启动加载一样,喂,你可是一部相机!一部要随时待命的相机!
此外,G9M2还有一个让人难以理解的BUG,那就是在塞入不同的存储卡时,回放速度也会发生改变,双卡会让回访速度下降,非常影响使用体验。
M43的镜头群固然数量众多,然而更新缓慢,因此我们可以说它镜头群丰富,但是难言强大与生命力,尤其是在G9M2搭载相位对焦之后,松下并没有非常充足的新镜头,来适配这一对焦系统。日常使用中可以明细感受到依旧是DFD下的反差拥有足够的速度,而相位在对焦速度上并不如人意,所以昔日丰富的镜头群反而成了一个潜在的掣肘,松下还有精力去更新那么庞大的M43产品线吗?看一看松下在镜头与机身的布局和宣传,可能性应该是越来越小。
小巧上的疑问来源于机身,对于M43来说,这个机身不可谓不大,尤其是神经病一样的EVF突出部。(这个突出部可以从S5M2的拆机图解释,其EVF的背面是主板的顶部。所以借用机身的坏处就在这里,G9M2又没有风扇,额头的空间应该浪费了)
但是整个系统的轻便是毋庸置疑的,得益于较小的成像圈,镜头体积可以做的比较小,从多镜头、多焦段的外出拍摄来看,整体系统可以称得上轻便,搭配丰富的自定义按键、波轮来使用也可谓舒适。
随着索尼将全局CMOS带到无反领域,全画幅的速度进入了一个拐点,下面就看各个厂家如何精确划分下一代全画幅相机的产品线。
而松下M43传感器的速度在如今这个节点并不能说飞快,DGO技术的加入更是让续航崩溃,在速度、功耗、画质均不占优的情况下,松下M43还能支持多久,这恐怕不仅是消费者的疑问,更是松下市场部门、研发部门要权衡的问题,从G9M2的放货及市场表现上来看,这种问题的答案可能显而易见了。
没有什么会不朽,M43走过了一段辉煌的岁月,等来了无反市场的全面发展,只不过这份市场的注脚是全画幅乃至中画幅,M43能走多远,这真是一个问题。